In this aricle I have implemented a Mealy type state machine in VHDL.The state machine bubble diagram in the below figure shows the operation of a four-state machine that reacts to a single input "input" as well as previous-state conditions.

library ieee;
use IEEE.std_logic_1164.all;
entity mealy is
port (clk : in std_logic;
reset : in std_logic;
input : in std_logic;
output : out std_logic
);
end mealy;
architecture behavioral of mealy is
type state_type is (s0,s1,s2,s3); --type of state machine.
signal current_s,next_s: state_type; --current and next state declaration.
begin
process (clk,reset)
begin
if (reset='1') then
current_s <= s0; --default state on reset.
elsif (rising_edge(clk)) then
current_s <= next_s; --state change.
end if;
end process;
--state machine process.
process (current_s,input)
begin
case current_s is
when s0 => --when current state is "s0"
if(input ='0') then
output <= '0';
next_s <= s1;
else
output <= '1';
next_s <= s2;
end if;
when s1 => --when current state is "s1"
if(input ='0') then
output <= '0';
next_s <= s3;
else
output <= '0';
next_s <= s1;
end if;
when s2 => --when current state is "s2"
if(input ='0') then
output <= '1';
next_s <= s2;
else
output <= '0';
next_s <= s3;
end if;
when s3 => --when current state is "s3"
if(input ='0') then
output <= '1';
next_s <= s3;
else
output <= '1';
next_s <= s0;
end if;
end case;
end process;
end behavioral;
I think the code is self explanatory.Depending upon the input and current state the next state is changed.And at the rising edge of the clock, current state is made equal to next state.A "case" statement is used for jumping between states.use IEEE.std_logic_1164.all;
entity mealy is
port (clk : in std_logic;
reset : in std_logic;
input : in std_logic;
output : out std_logic
);
end mealy;
architecture behavioral of mealy is
type state_type is (s0,s1,s2,s3); --type of state machine.
signal current_s,next_s: state_type; --current and next state declaration.
begin
process (clk,reset)
begin
if (reset='1') then
current_s <= s0; --default state on reset.
elsif (rising_edge(clk)) then
current_s <= next_s; --state change.
end if;
end process;
--state machine process.
process (current_s,input)
begin
case current_s is
when s0 => --when current state is "s0"
if(input ='0') then
output <= '0';
next_s <= s1;
else
output <= '1';
next_s <= s2;
end if;
when s1 => --when current state is "s1"
if(input ='0') then
output <= '0';
next_s <= s3;
else
output <= '0';
next_s <= s1;
end if;
when s2 => --when current state is "s2"
if(input ='0') then
output <= '1';
next_s <= s2;
else
output <= '0';
next_s <= s3;
end if;
when s3 => --when current state is "s3"
if(input ='0') then
output <= '1';
next_s <= s3;
else
output <= '1';
next_s <= s0;
end if;
end case;
end process;
end behavioral;
The code was synthesised using Xilinx XST and the results are shown below:
---------------------------------------------------------
States 4
Transitions 8
Inputs 1
Outputs 4
Clock clk (rising_edge)
Reset reset (positive)
Reset type asynchronous
Reset State s0
Power Up State s0
Encoding Automatic
Implementation LUT
---------------------------------------------------------
Optimizing FSM
-------------------
State | Encoding
-------------------
s0 | 00
s1 | 01
s2 | 11
s3 | 10
-------------------
Minimum period: 0.926ns (Maximum Frequency: 1080.030MHz)
Minimum input arrival time before clock: 1.337ns
Maximum output required time after clock: 3.305ns
Maximum combinational path delay: 3.716ns
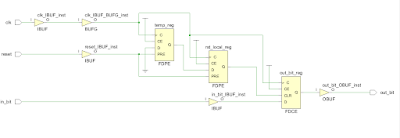
The technology schematic is shown below:

As you can see from the schematic, XST has used two flipflops for implementing the state machine.The design can be implemented in hardware using many FSM encoding algorithms.The algorithm used here is "Auto" which selects the needed optimization algorithms during the synthesis process.Similarly there are other algorithms like one-hot,compact,gray,sequential,Johnson,speed1 etc.The required algorithm can be selected by going to Process -> Properties -> HDL options -> FSM encoding algorithm in the main menu.Now select the required one, from the drop down list.
More information about these options can be found here.
A very popular encoding method for FSM is One-Hot, where only one state variable bit is set, or "hot," for each state.The synthesis details for the above state machine implementation using One-hot method is given below:
Optimizing FSM
-------------------
State | Encoding
-------------------
s0 | 0001
s1 | 0010
s2 | 0100
s3 | 1000
-------------------
Minimum period: 1.035ns (Maximum Frequency: 966.464MHz)
Minimum input arrival time before clock: 1.407ns
Maximum output required time after clock: 3.418ns
Maximum combinational path delay: 3.786ns
The Technology schematic is shown below:

But there are some advantages with one-hot method:
1)Because only two bits change per transition, power consumption is small.
2)They are easy to implement in schematics.